The communication between wechat-mini-program and ESP8266
用了大约一个月的时间做了一个ESP8266模块驱动的四足机器人,机器人的动作和屏幕显示主要参考了其他开源项目,但是这些项目往往依靠ESP8266本身创建Web服务进行控制,不方便缺乏技术基础的人使用,我开发了一个微信小程序利用MQTT通讯协议对机器人进行控制,在使用上方便了许多。
Overview

Features
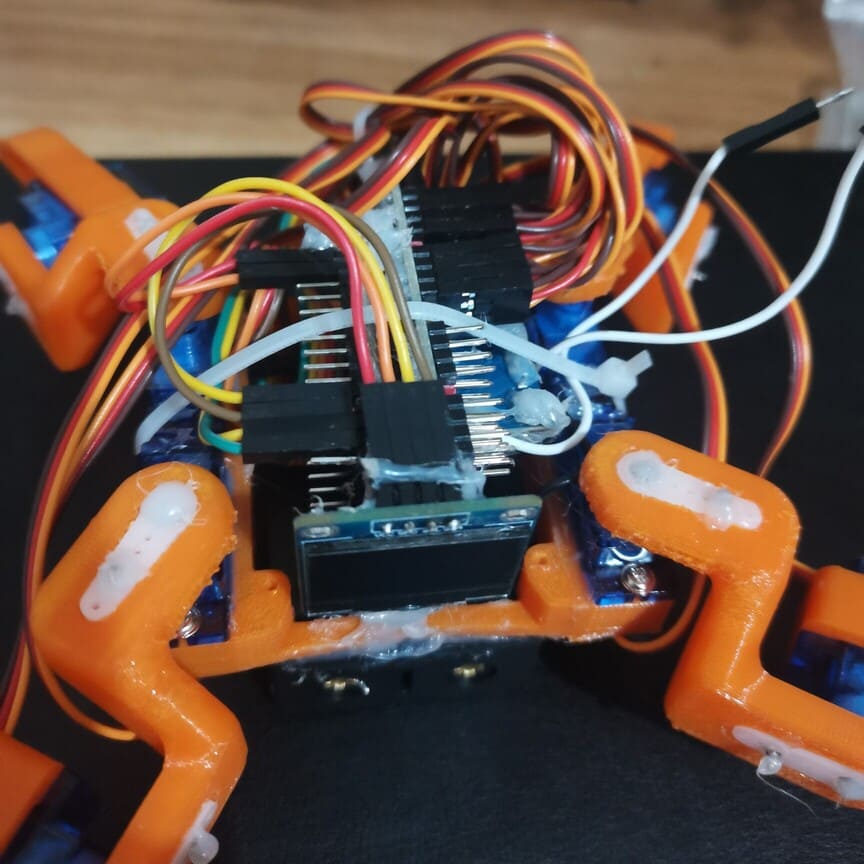
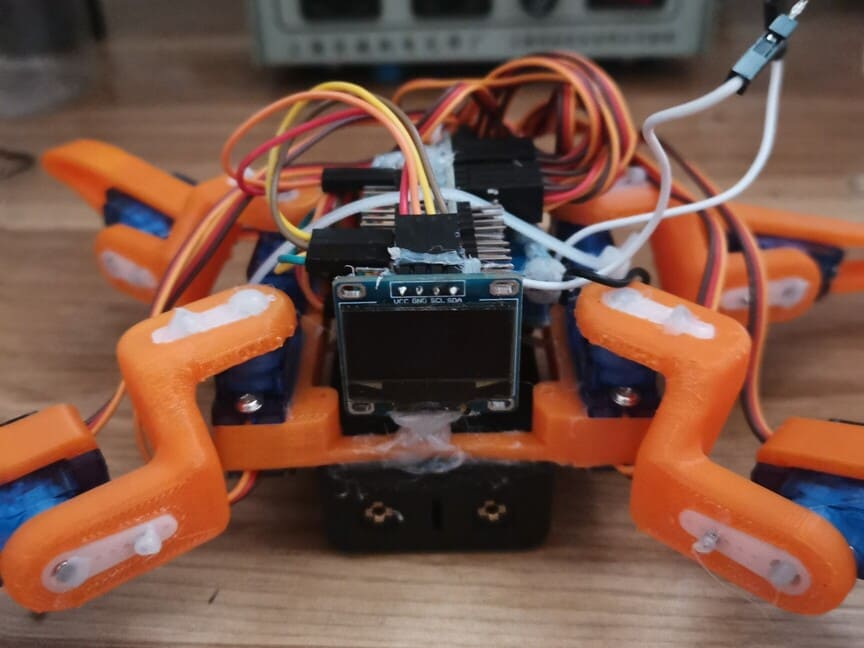
该机器人主体部分基于ESP8266(nodemcu)模块开发,利用PCA9685舵机扩展板通过PWM库控制8个SG90舵机。
电源由两节并联的18650锂离子电池供电,用升压板将电压由3.7V升至约4.8V接入舵机扩展板。
屏幕为64x128的一块I2C协议OLED屏(SSD1306),利用U8G2库控制屏幕输出。
控制部分通过ESP8266的WiFiMulti库接入网络,利用PubSubClient库建立mqtt通讯。
利用MQTX可以在服务器上便捷地搭建MQTT服务,使用nginx为mqtt服务做反向代理,并添加ssl支持。为了让正式发布的小程序接入mqtt服务器,域名需要备案且将其加入合法域名。
小程序通过引入mqtt.min.js文件可以方便地加入mqtt支持。
Open Source
整个项目当前已经基本完善,待代码整理清晰并加入注释后将开源。
An ESP8266 robot controlled via wechat mini program
Showcase
Robot
Wechat Mini Program

